Dragonfly Drone
Project Overview
University
Year
About
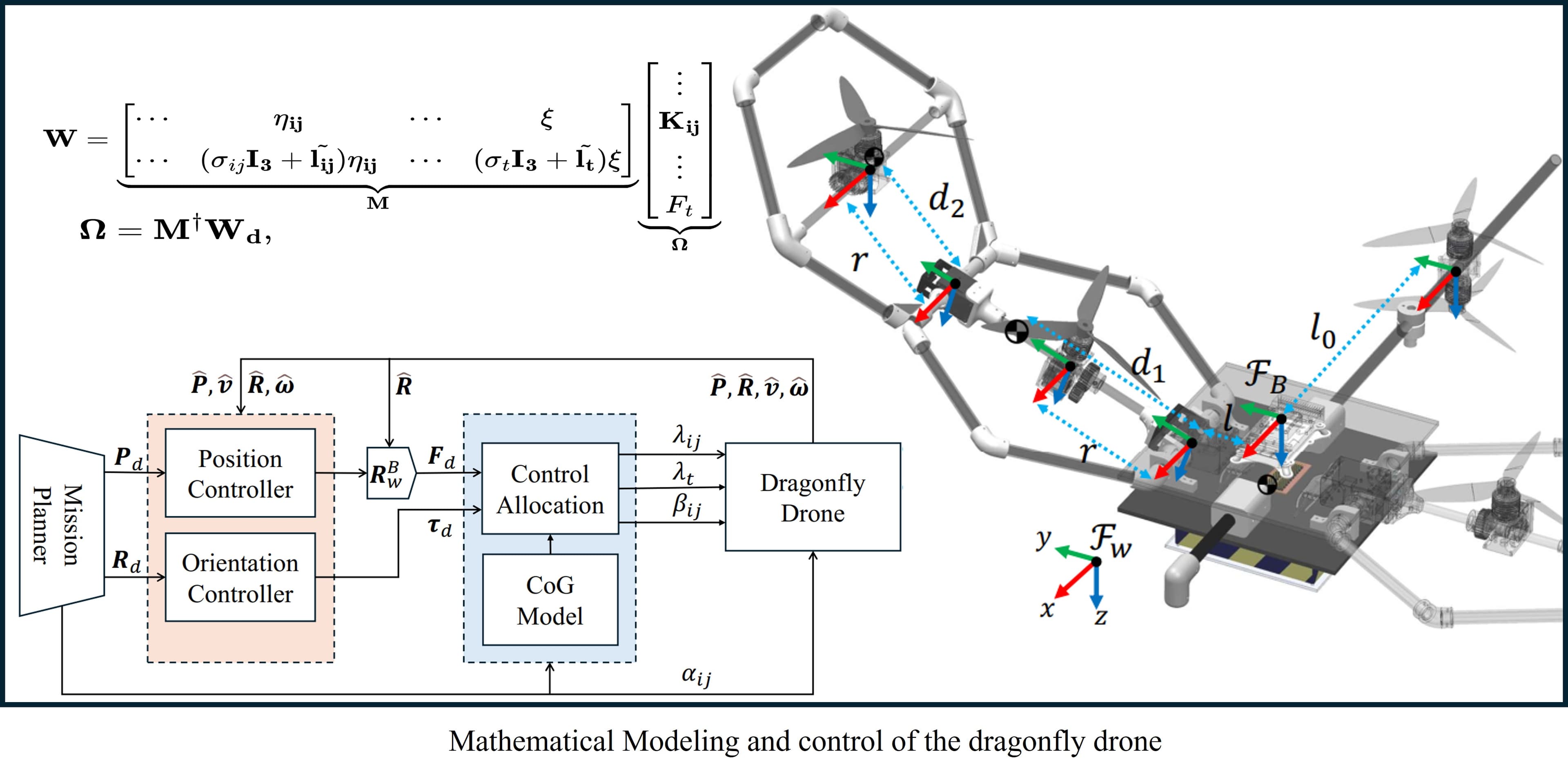
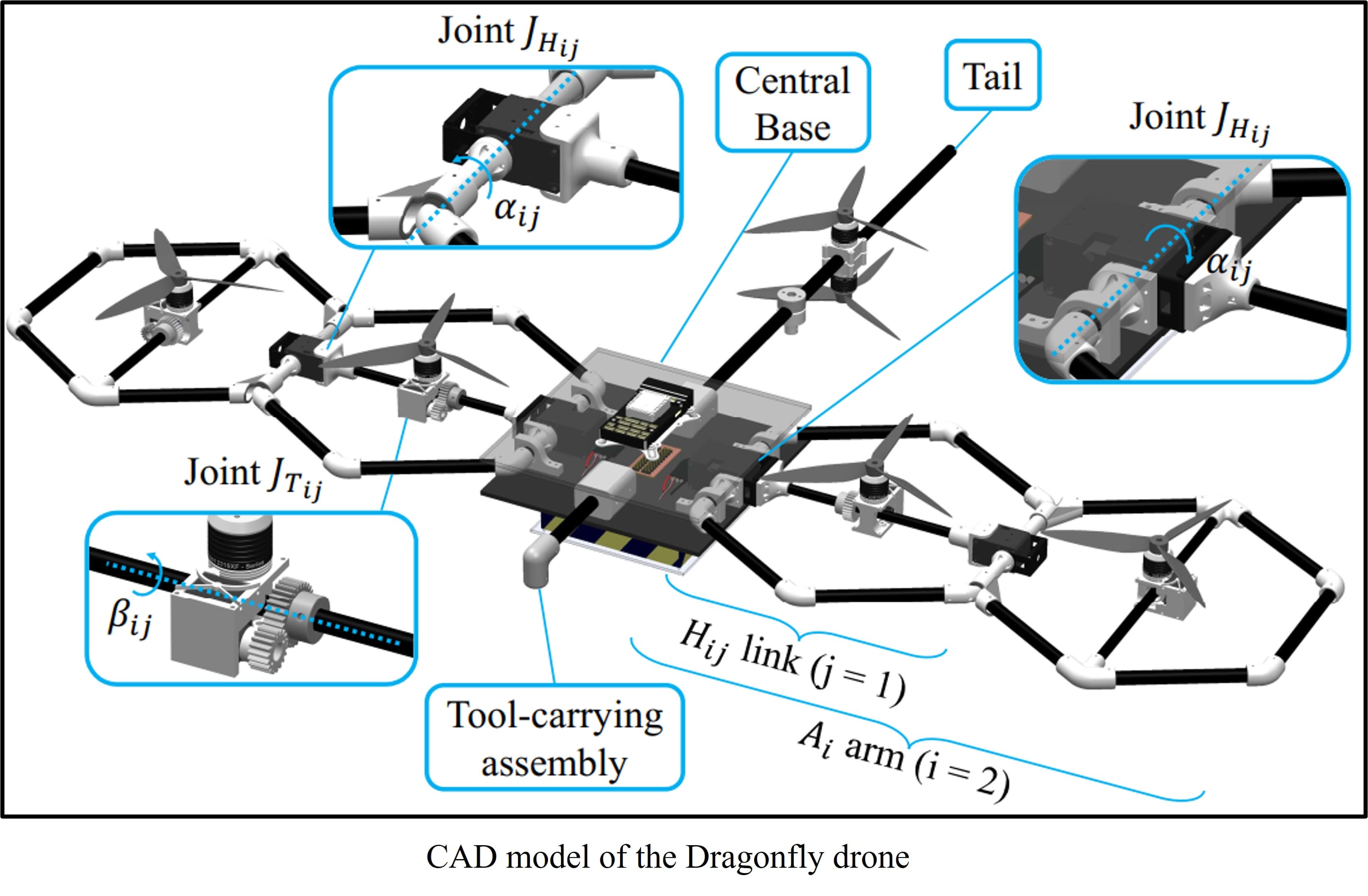
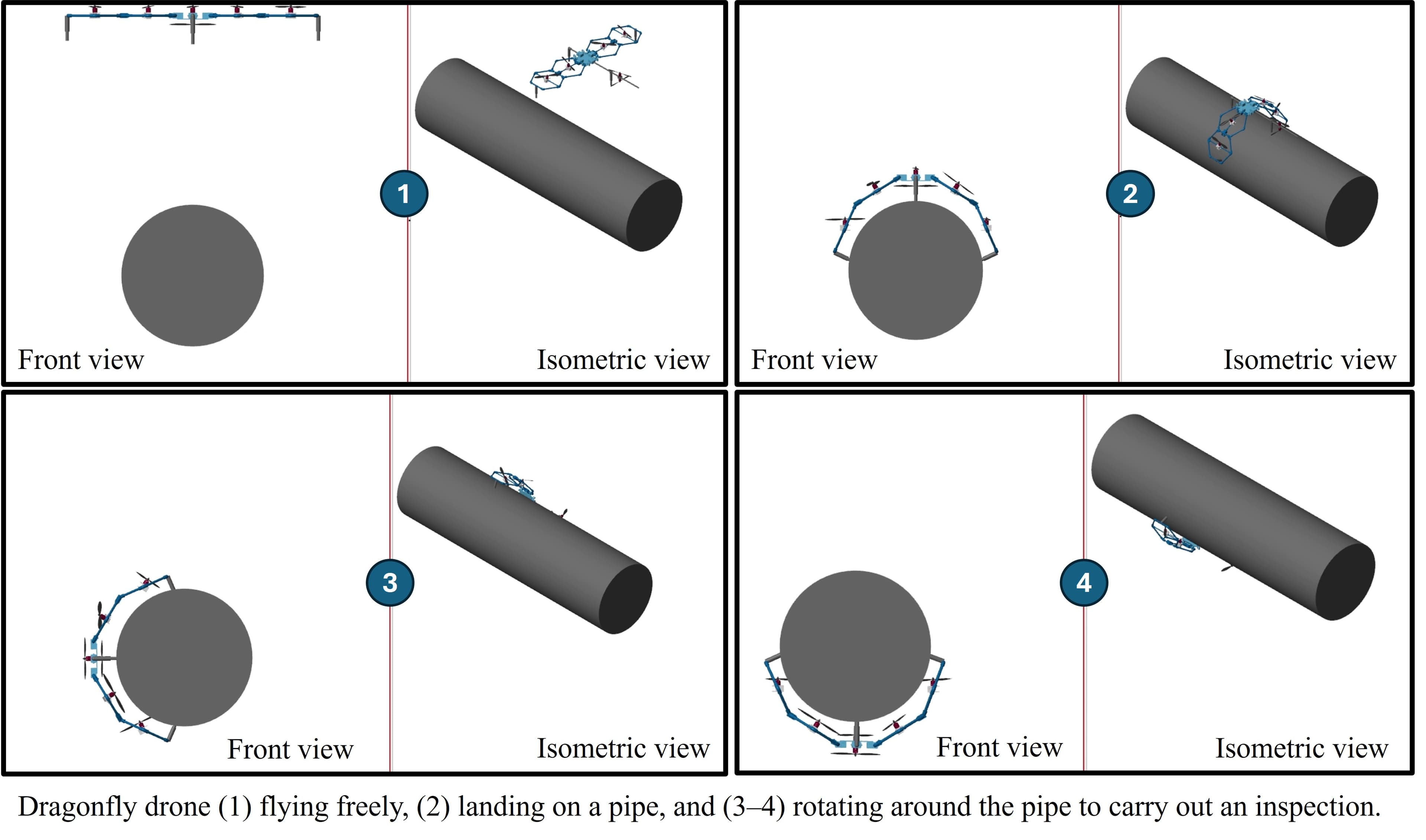
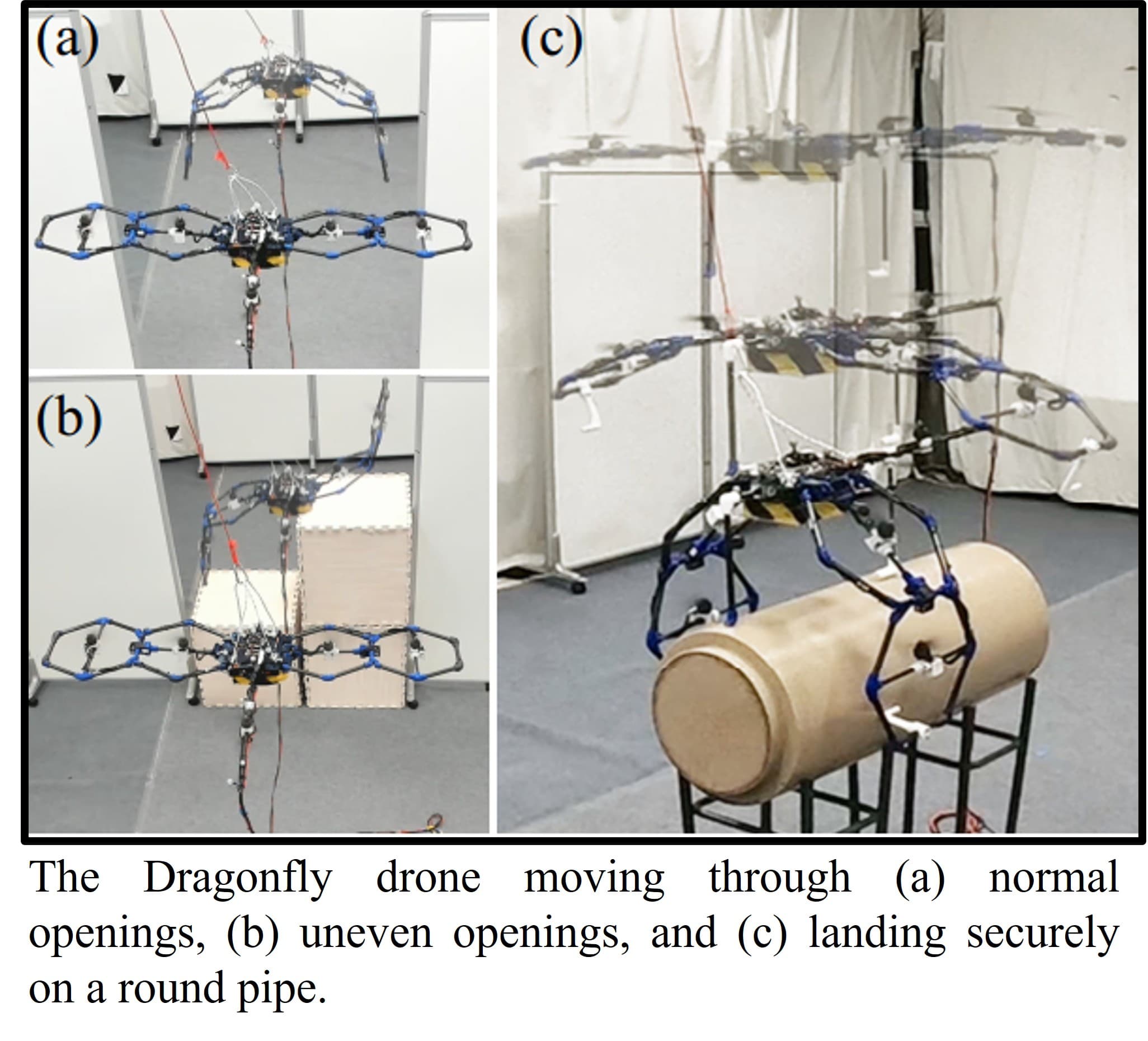
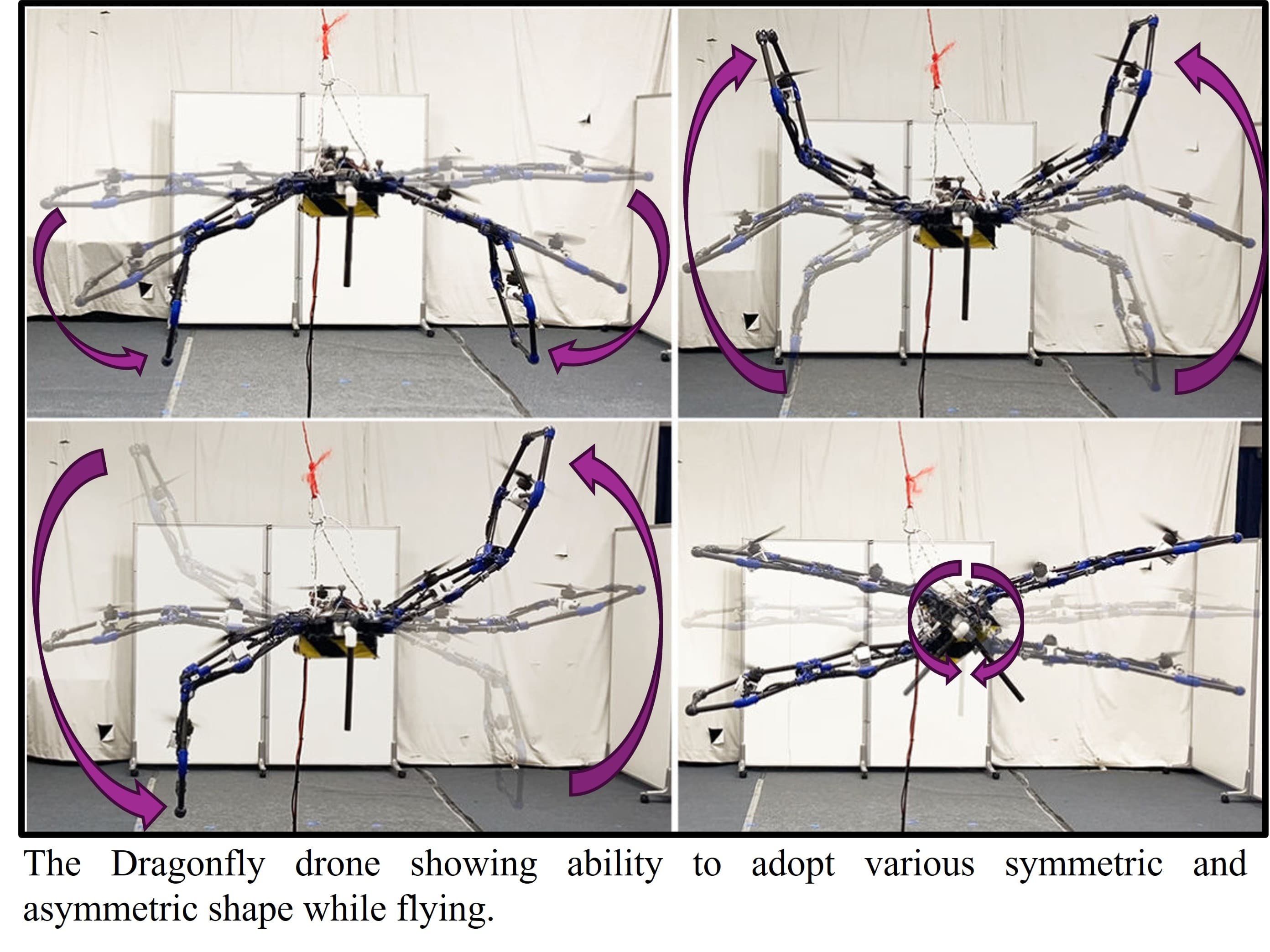
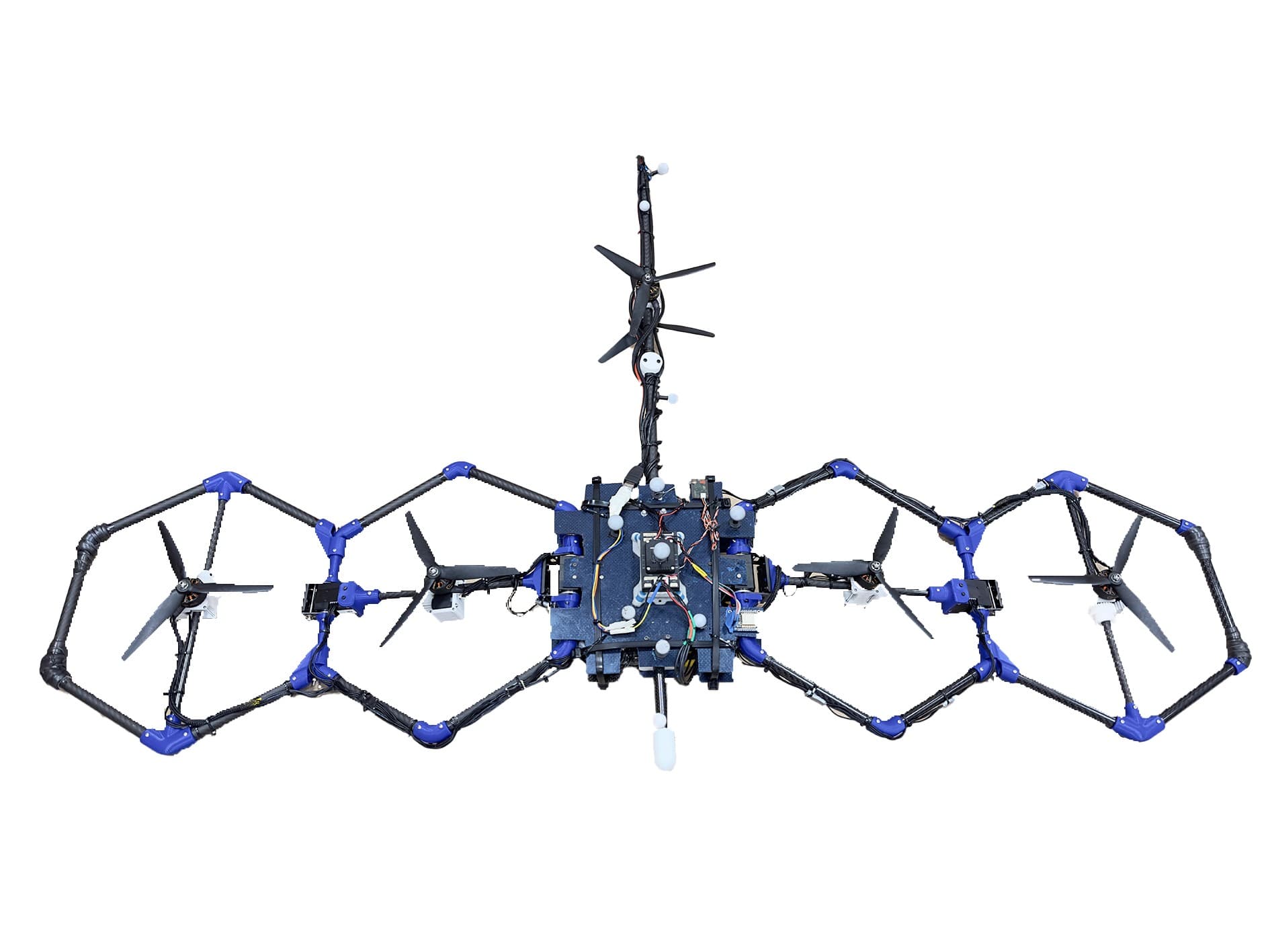
This morphing aerial robot replaces humans in high-risk tasks such as infrastructure inspection and maintenance. Equipped with perching, tethering, and manipulation capabilities, it adapts to complex structures and performs precise interventions, eliminating the need for scaffolding, cranes, or rope access. By reducing workplace accidents, cutting operational costs, and avoiding the environmental impact of heavy machinery, this system offers a safer, more sustainable solution for industries operating in hazardous or hard-to-reach environments
Team

Dr. Mir Feroskhan
Supervising Professor

Aqsa Batool

Syed Waqar Hameed
I am a robotics researcher and Ph.D. candidate at Nanyang Technological University (NTU), Singapore, supported by the prestigious SINGA scholarship. My work focuses on advancing aerial robotics, with particular emphasis on morphing multirotor systems for aerial manipulation and infrastructure interaction. Collaborating with the Agency for Science, Technology and Research (A*STAR), I have developed the “Dragonfly Drone,” a novel tilt-rotor morphing UAV capable of perching and heavy-duty manipulation. With a background in control systems and embedded technologies, my research aims to expand the capabilities of autonomous aerial platforms for real-world applications.
Gallery